My research interest lies in 3D/4D computer vision, with a particular focus on 3D/4D scene representation, reconstruction, and generation. I’m also passionate about multimodal learning and robotics, having worked with diverse sensing modalities including RGB-D cameras, event cameras, IMUs, phased array mmWave radars and acoustic sensors.
I’m currently in the job market. Do reach out if you have any opportunities that you think I might be a good fit for!
news
May 26, 2025
I successfully defended my PhD thesis titled “Neural 3D Scene Representation and Reconstruction”
Feb 7, 2025
I received my second Research Achievement Award from NUS School of Computing
Dec 2, 2024
I started my research scientist internship at Meta Reality Labs, Zurich
Jan 9, 2024
I received the Research Achievement Award from NUS School of Computing
The distinctive design philosophy of event cameras makes them ideal for high-speed, high dynamic range & low-light environments, where standard cameras underperform. However, event cameras also suffer from motion blur, especially under these challenging conditions, contrary to what most think. This is due to the limited bandwidth of the event sensor pixel, which is mostly proportional to the light intensity. Thus, to ensure event cameras can truly excel in such conditions where it has an edge over standard cameras, event motion blur must be accounted for in downstream tasks, especially reconstruction. However, no prior work on reconstructing Neural Radiance Fields (NeRFs) from events, nor event simulators, have considered the full effects of event motion blur. To this end, we propose, Deblur e-NeRF, a novel method to directly and effectively reconstruct blur-minimal NeRFs from motion-blurred events, generated under high-speed or low-light conditions. The core component of this work is a physically-accurate pixel bandwidth model that accounts for event motion blur. We also introduce a threshold-normalized total variation loss to better regularize large textureless patches. Experiments on real & novel realistically simulated sequences verify our effectiveness. Our code, event simulator and synthetic event dataset are open-sourced.
@inproceedings{low2024_deblur-e-nerf,title={Deblur e-NeRF: NeRF from Motion-Blurred Events under High-speed or Low-light Conditions},author={Low, Weng Fei and Lee, Gim Hee},booktitle={European Conference on Computer Vision (ECCV)},year={2024},}
Multi-Scale 3D Gaussian Splatting for Anti-Aliased Rendering
Zhiwen Yan, Weng Fei Low, Yu Chen, and Gim Hee Lee
In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2024
3D Gaussians have recently emerged as a highly efficient representation for 3D reconstruction and rendering. Despite its high rendering quality and speed at high resolutions, they both deteriorate drastically when rendered at lower resolutions or from far away camera position. During low resolution or far away rendering, the pixel size of the image can fall below the Nyquist frequency compared to the screen size of each splatted 3D Gaussian and leads to aliasing effect. The rendering is also drastically slowed down by the sequential alpha blending of more splatted Gaussians per pixel. To address these issues, we propose a multi-scale 3D Gaussian splatting algorithm, which maintains Gaussians at different scales to represent the same scene. Higher-resolution images are rendered with more small Gaussians, and lower-resolution images are rendered with fewer larger Gaussians. With similar training time, our algorithm can achieve 13%-66% PSNR and 160%-2400% rendering speed improvement at 4x-128x scale rendering on Mip-NeRF360 dataset compared to the single scale 3D Gaussian splatting.
@inproceedings{yan2023_anti-aliased-gaussian,title={Multi-Scale 3D Gaussian Splatting for Anti-Aliased Rendering},author={Yan, Zhiwen and Low, Weng Fei and Chen, Yu and Lee, Gim Hee},booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},year={2024},}
Robust e-NeRF: NeRF from Sparse & Noisy Events under Non-Uniform Motion
Event cameras offer many advantages over standard cameras due to their distinctive principle of operation: low power, low latency, high temporal resolution and high dynamic range. Nonetheless, the success of many downstream visual applications also hinges on an efficient and effective scene representation, where Neural Radiance Field (NeRF) is seen as the leading candidate. Such promise and potential of event cameras and NeRF inspired recent works to investigate on the reconstruction of NeRF from moving event cameras. However, these works are mainly limited in terms of the dependence on dense and low-noise event streams, as well as generalization to arbitrary contrast threshold values and camera speed profiles. In this work, we propose Robust e-NeRF, a novel method to directly and robustly reconstruct NeRFs from moving event cameras under various real-world conditions, especially from sparse and noisy events generated under non-uniform motion. It consists of two key components: a realistic event generation model that accounts for various intrinsic parameters (e.g. time-independent, asymmetric threshold and refractory period) and non-idealities (e.g. pixel-to-pixel threshold variation), as well as a complementary pair of normalized reconstruction losses that can effectively generalize to arbitrary speed profiles and intrinsic parameter values without such prior knowledge. Experiments on real and novel realistically simulated sequences verify our effectiveness. Our code, synthetic dataset and improved event simulator are public.
@inproceedings{low2023_robust-e-nerf,title={Robust e-NeRF: NeRF from Sparse & Noisy Events under Non-Uniform Motion},author={Low, Weng Fei and Lee, Gim Hee},booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},year={2023},}
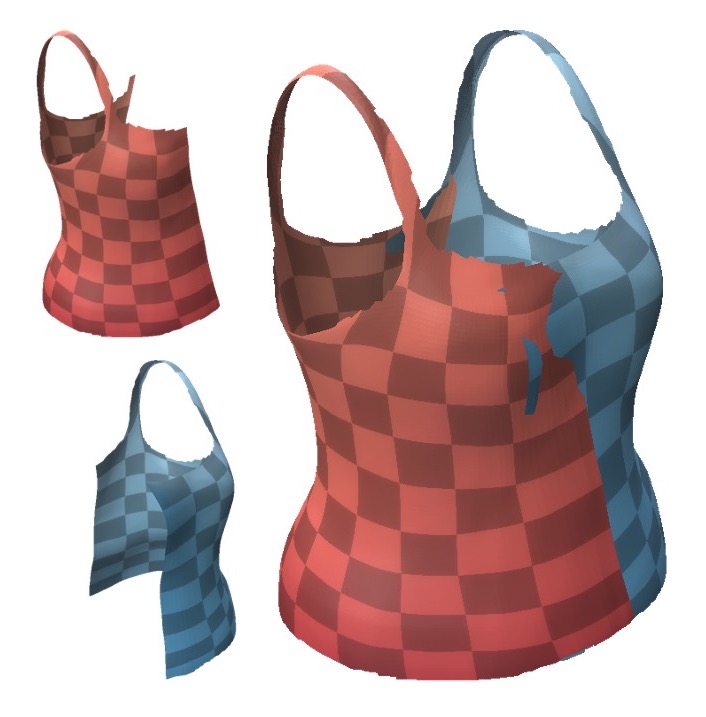
Minimal Neural Atlas: Parameterizing Complex Surfaces with Minimal Charts and Distortion
Explicit neural surface representations allow for exact and efficient extraction of the encoded surface at arbitrary precision, as well as analytic derivation of differential geometric properties such as surface normal and curvature. Such desirable properties, which are absent in its implicit counterpart, makes it ideal for various applications in computer vision, graphics and robotics. However, SOTA works are limited in terms of the topology it can effectively describe, distortion it introduces to reconstruct complex surfaces and model efficiency. In this work, we present Minimal Neural Atlas, a novel atlas-based explicit neural surface representation. At its core is a fully learnable parametric domain, given by an implicit probabilistic occupancy field defined on an open square of the parametric space. In contrast, prior works generally predefine the parametric domain. The added flexibility enables charts to admit arbitrary topology and boundary. Thus, our representation can learn a minimal atlas of 3 charts with distortion-minimal parameterization for surfaces of arbitrary topology, including closed and open surfaces with arbitrary connected components. Our experiments support the hypotheses and show that our reconstructions are more accurate in terms of the overall geometry, due to the separation of concerns on topology and geometry.
@inproceedings{low2022_mna,title={Minimal Neural Atlas: Parameterizing Complex Surfaces with Minimal Charts and Distortion},author={Low, Weng Fei and Lee, Gim Hee},booktitle={European Conference on Computer Vision (ECCV)},year={2022},}
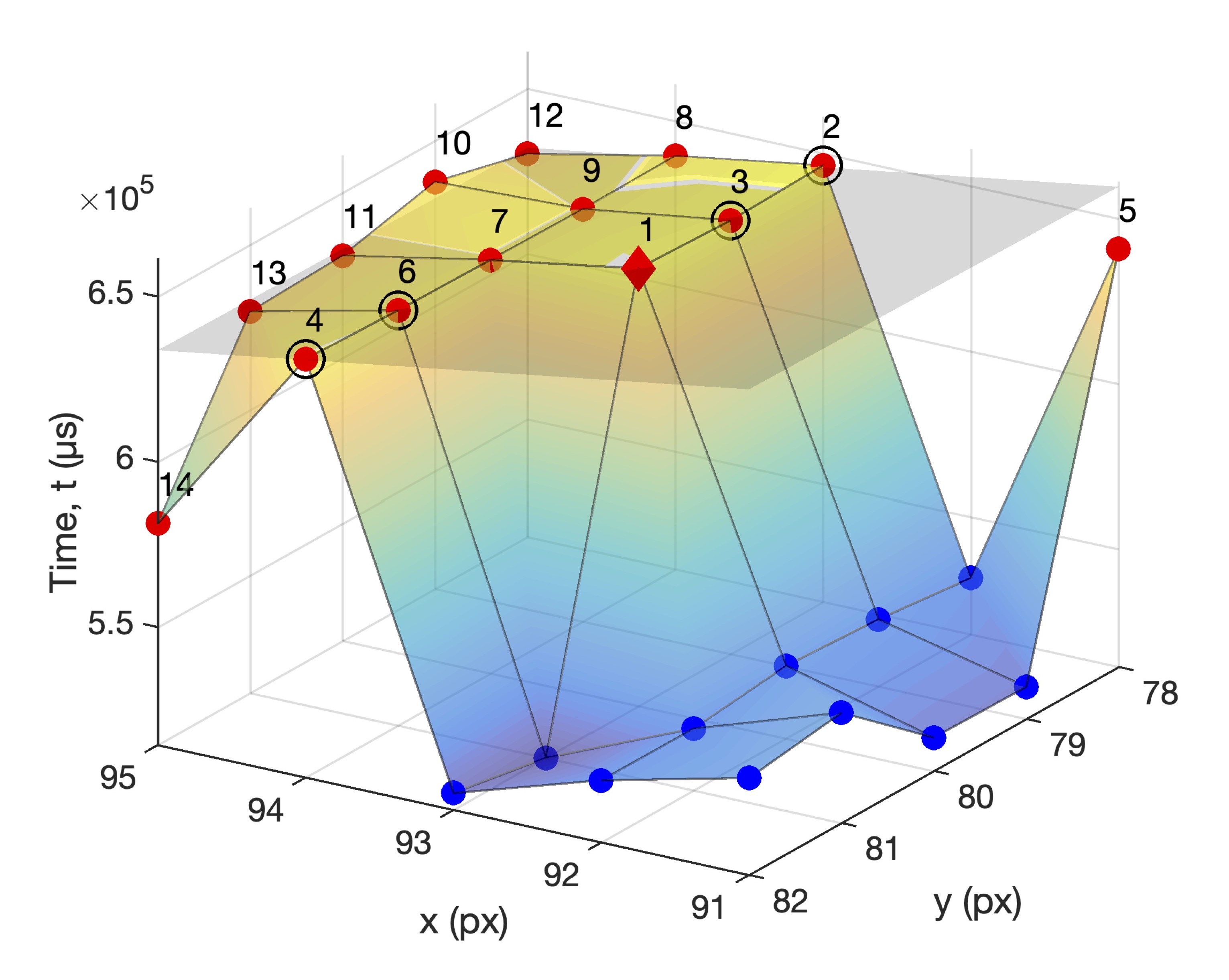
SOFEA: A Non-Iterative and Robust Optical Flow Estimation Algorithm for Dynamic Vision Sensors
We introduce the single-shot optical flow estimation algorithm (SOFEA) to non-iteratively compute the continuous-time flow information of events produced from bio-inspired cameras such as the dynamic vision sensor (DVS). The output of a DVS is a stream of asynchronous spikes ("events"), transmitted at very minimal latency (1-10 ms), caused by local brightness changes. Due to this unconventional output, a continuous representation of events over time is invaluable to most applications using the DVS. To this end, SOFEA consolidates the spatio-temporal information on the surface of active events for flow estimation in a single-shot manner, as opposed to iterative methods in the literature. In contrast to previous works, this is also the first principled method towards finding locally optimal set of neighboring events for plane fitting using an adaptation of Prim’s algorithm. Consequently, SOFEA produces flow estimates that are more accurate across a wide variety of scenes compared to state-of-the-art methods. A direct application of such flow estimation is rendering sharp event images using the set of active events at a given time, which is further demonstrated and compared to existing works.
@inproceedings{low2020_sofea,title={SOFEA: A Non-Iterative and Robust Optical Flow Estimation Algorithm for Dynamic Vision Sensors},author={Low, Weng Fei and Gao, Zhi and Xiang, Cheng and Ramesh, Bharath},booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW)},year={2020},}
patents
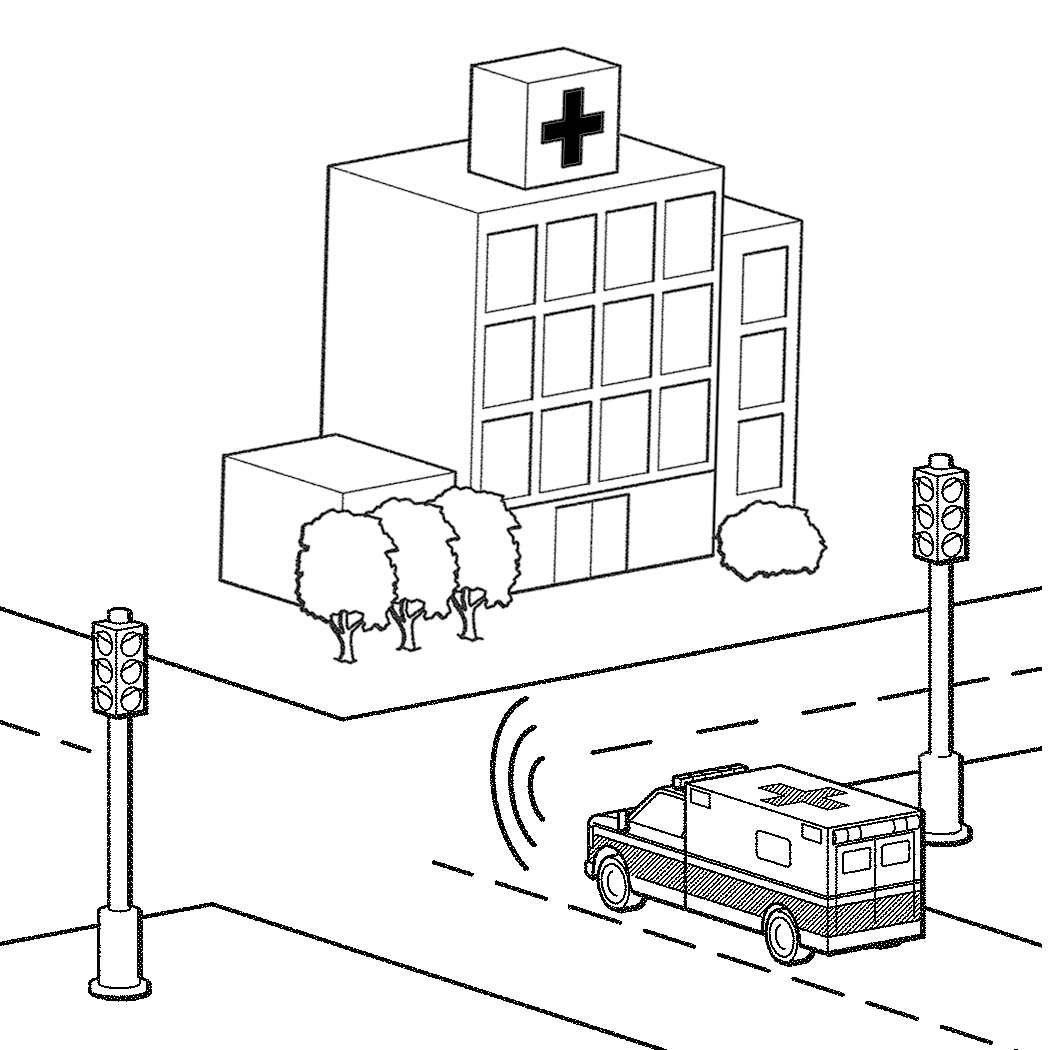
Using Classified Sounds and Localized Sound Sources to Operate an Autonomous Vehicle
An ambient sound environment is captured by a microphone array of an autonomous vehicle traveling in the ambient sound environment. A perception module of the autonomous vehicle classifies sounds and localizes sound sources in the ambient sound environment. Classification is performed using spectrum analysis and/or machine learning. In an embodiment, sound sources within a field of view (FOV) of an image sensor of the autonomous vehicle are localized in a visual scene generated by the perception module. In an embodiment, one or more sound sources outside the FOV of the image sensors are localized in a static digital map. Localization is performed using parametric or non-parametric techniques and/or machine learning. The output of the perception module is input into a planning module of the autonomous vehicle to plan a route or trajectory for the autonomous vehicle in the ambient sound environment.
@misc{leenayongwut2023_ssl,title={Using Classified Sounds and Localized Sound Sources to Operate an Autonomous Vehicle},author={Leenayongwut, Metarsit and Low, Weng Fei},year={2023},note={US Patent 11,567,510},}
experience
Research Scientist Intern — Meta Reality Labs, Zurich